CLOCK SYNCHRONIZATION
Every computer needs a timer mechanism (called a computer clock) to keep track of current time and also For various accounting purposes such as calculating the time spent by a process in CPU utilization, disk I/O and so on, so that the corresponding user can be charged properly.
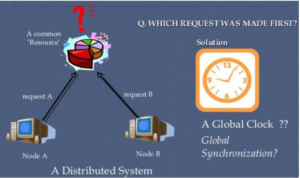
In a distributed system, an application may have processes that concurrently run on multiple nodes of the system. For correct results, several such distributed applications require that the clocks of the nodes are subchronised with each other.
For example, for a distributed-on line reservation system to be fair, the only remaining seat booked almost simultaneously from two different nodes should be offered to the client who booked first, even if the time different between the two bookings is very small. It may not be possible to guarantee this if the clocks of the nodes of the system are not synchronized. In a distributed system, synchronized clocks also enable one to measure the duration of distributed activities that start on one node and terminate on another node, for instance calculating the time taken to transmit a message from one node to another at any arbitrary time. It is difficult to get the correct result in the case if the clocks of the sender and receiver nodes are not synchronized
There are several other applications of synchronized clocks in distributed systems. Some good examples of such applications may be found in [Liskov 1993].
The discussion above shows that it is the job of a distributed operating system designer to devise and use suitable algorithms for properly synchronizing the clocks of a distributed system. This section presents a description of such algorithms. However, for a better understanding of these algorithms, we will first discuss how computer clocks are implemented and what are the main issues in synchronizing the clocks of a distributed system?
HOW COMPUTER CLOCKS ARE IMPLEMENTED
A computer clock usually consists of three components –
a quartz crystal that oscillates at a well-defined frequency,
a counter register, and
a holding register.
The holding register is used to store a constant value that is decided based on the frequency of oscillation of the quartz crystal. That is, the value in the counter register is decremented by 1 for each oscillation of the quartz crystal. When the value of the counter register becomes zero, an interrupt is generated and its value is reinitialized to the value in the holding register. Each interrupt is called clock tick. The value in the holding register is chosen 60 so that on 60 clock ticks occur in a second.
CMOS RAM is also present in most of the machines which keeps the clock of the machine up-to-date even when the machine is switched off. When we consider one machine and one clock, then slight delay in the clock ticks over the period of time does not matter, but when we consider n computers having n crystals, all running at a slightly different time, then the clocks get out of sync over the period of time. This difference in time values is called clock skew.
Tool Ordering of Events:
We have seen how a system of clocks satisfying the clock condition can be used to order the events of a system based on the happened before relationship among the events. We simply need to order the events by the times at which they occur. However that the happened before relation is only a partial ordering on the set of all events in the system. With this event ordering scheme, it is possible that two events a and b that are not related by the happened before relation (either directly or indirectly) may have the same timestamps associated with them. For instance, if events a and b happen respectively in processes P1 and P2 , when the clocks of both processes show exactly the same time (Say 100), both events will have a timestamp of 100. In this situation, nothing can be said about the order of the two events. Therefore, for total ordering on the set of all system events an additional requirement is desirable. No two events ever occur all exactly the same time. To fulfill this requirement, Namport proposed the use of any arbitrary total ordering of the processes. For example, process identity numbers may be used to break ties and to create a total ordering on events. For instance, in the situation described above, the timestamps associated with events a and b will be 100.001 and 100.002, respectively, where the process identity numbers of processes P1 and P2 are 001 and 002 respectively. Using this method, we now have a way to assign a unique timestamp to each event in a distributed system to provide a total ordering of all events in the system.